finding the relative orientation¶
The basic tool for computing relative orientation in MicMac is Tapas:
mm3d Tapas <CameraModel> <Pattern>
MicMac has a number of camera models. For many applications, a basic radial distortion model, RadialBasic, will probably suffice. This model is especially useful in cases where models with additional degrees of freedom, such as RadialExtended, are likely to diverge owing to issues with distortion in the images.
The basic syntax used for RadialBasic is:
mm3d Tapas RadialBasic <Pattern> Out=<OutDir> SH=HomolMasqFiltered LibFoc=0
Here, it might help to use LibFoc=0 (i.e., hold the focal length fixed at the value specified in
MicMac-LocalChantierDescripteur.xml), as the calibration for older images can often be unstable.
With a large number of images, it might help to create an initial calibration based on a few “nice” images (i.e., plenty of tie points/contrast) before trying to run the calibration on the entire set of images:
mm3d Tapas RadialBasic "<Image>(1-5).tif" Out=CalibInit SH=HomolMasqFiltered LibFoc=0
This will create an initial directory, Ori-CalibInit, based on the images specified by the search pattern. Once
you have a stable initial calibration, you can use this to seed the calibration for the entire block of images:
mm3d Tapas RadialBasic "OIS.*tif" InCal=CalibInit Out=Relative SH=HomolMasqFiltered LibFoc=0
This will create a new directory, Ori-Relative, that contains orientation files for each of the different images
in the directory, as well as the calibration for each “camera” specified in MicMac-LocalChantierDescripteur.xml.
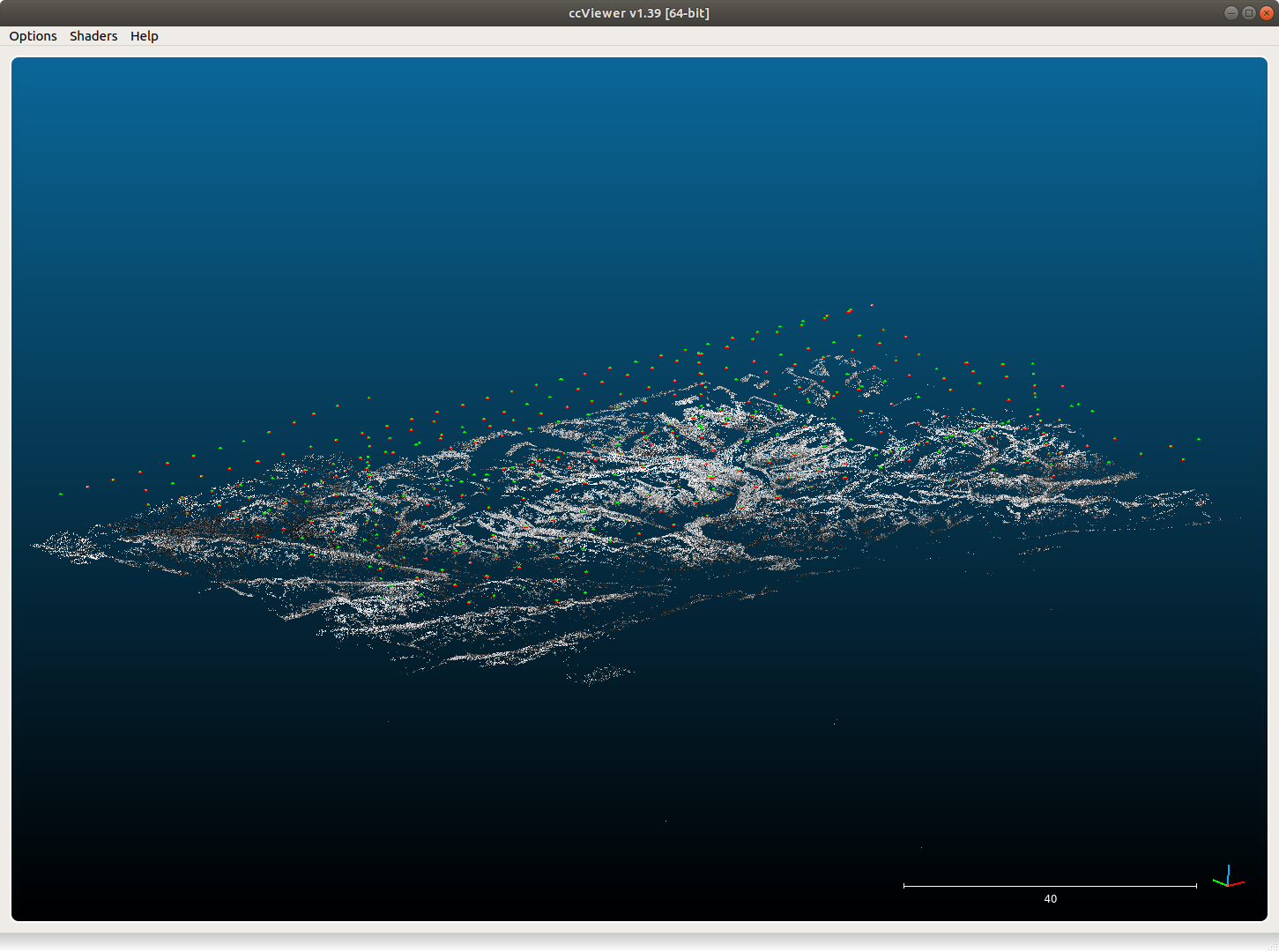
If Tapas successfully completes, you can then create a point cloud to visualize the relative orientation and
inspect it for any errors:
mm3d AperiCloud "OIS.*tif" Relative SH=HomolMasqFiltered
You can then open the .ply file using, for example, Cloud Compare or
Meshlab:
fixing the orientation¶
If your Tapas output looks okay, you can move on to the next step, computing the relative orthophoto.
If you are unlucky, however, there are some tools in spymicmac.micmac() to help manipulate the orientation
files to help Tapas converge. For example, occasionally cameras will be positioned in an incorrect location, especially images with lots of
ice/snow.
If the absolute camera positions are (approximately) known, spymicmac.micmac.fix_orientation() will estimate
an affine transformation between the known absolute positions and the relative positions estimated by Tapas.
Outliers are identified by comparing the normalized median absolute deviation (NMAD) of the residuals, and the camera
positions in the orientation file are overwritten with the position estimated from the transformation using
spymicmac.micmac.update_center().
Note
Once you have updated the center locations with the new estimated positions, you should re-run Tapas
using InOri=<Updated Orientation>:
mm3d Tapas RadialBasic "OIS.*tif" InOri=Relative Out=Relative LibFoc=0
In most cases (but not always!), seeding the locations in this way will help Tapas converge to a
more accurate solution.
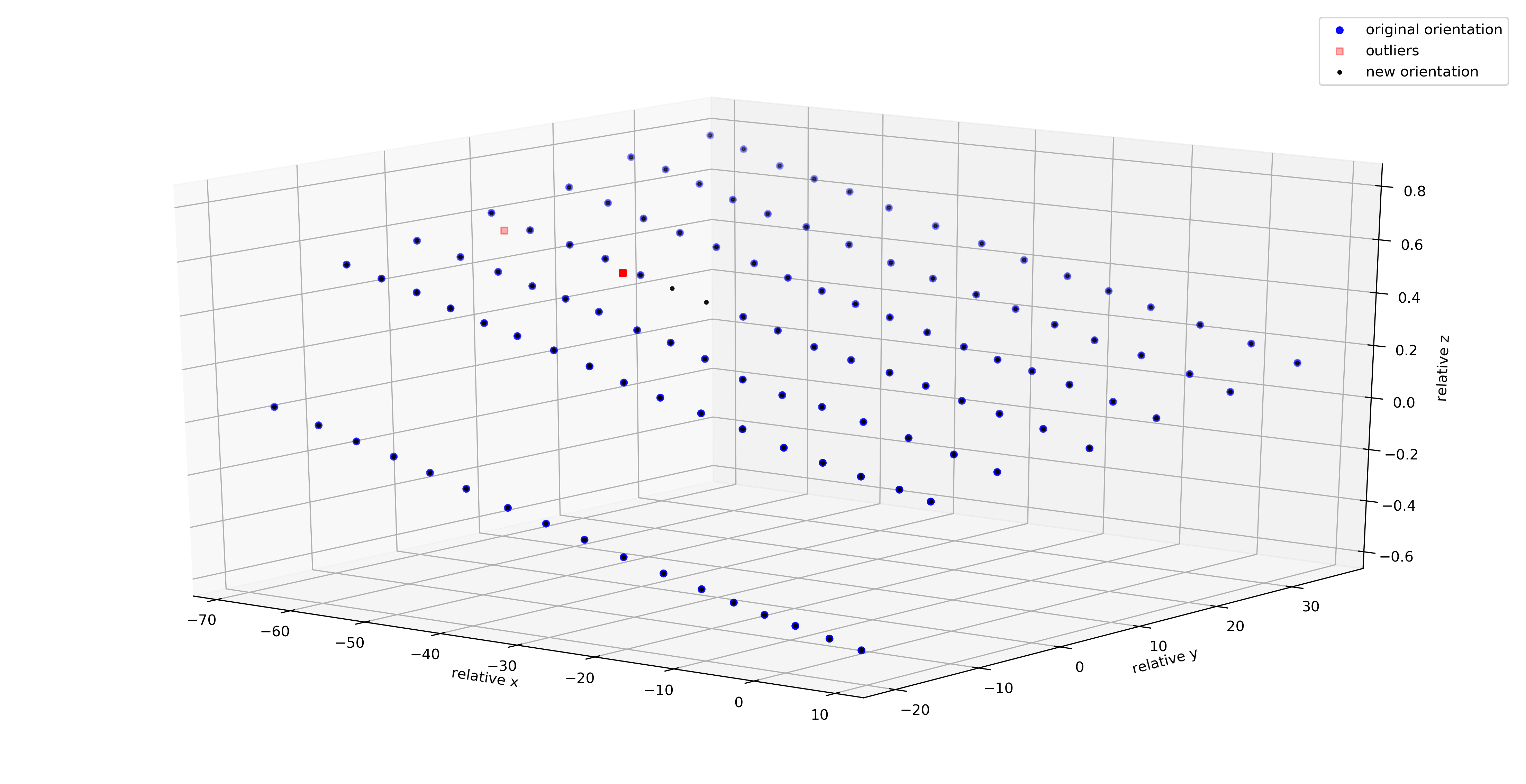
In the example shown below, two images (marked with red squares) have been identified as outliers using the estimated
transformation. The positions have been updated using spymicmac.micmac.fix_orientation(), and re-running
Tapas has helped position the cameras correctly:
If the camera positions are not well-known (often the case for historic air photos), you can use
spymicmac.micmac.interp_line() or spymicmac.micmac.extend_line() to estimate the positions based
on an assumed flight line, using positions that have converged properly. Once you have the new positions estimated,
you should update the positions in the orientation files using spymicmac.micmac.update_center(), and re-run
Tapas as shown above.